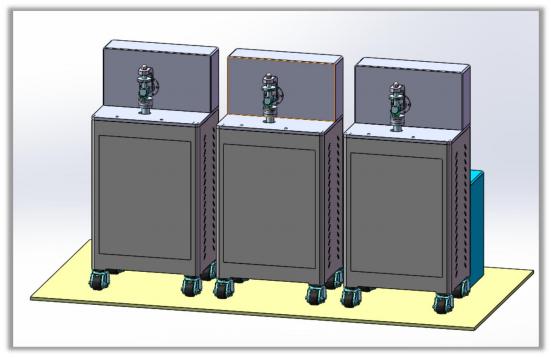
HK 3 тізе буынының тозуын сынаушы үш бөліктен тұрады: сынақ хосты, арматура және электронды басқару бөлігі. Ол тізе импланттарының тозуын, шаршауын және пиллингін және басқа зақымдану процестерін имитациялай алады және бір уақытта 3 тізе буындарын сынай алады.
 {6082}
{6082}
1 .1 Мүмкіндіктер
HK 3 тізе буынының тозуын сынаушы үш бөліктен тұрады: сынақ хосты, арматура және электронды басқару бөлігі. Ол тізе импланттарының тозуын, шаршауын және пиллингін және басқа зақымдану процестерін модельдей алады және бір уақытта 3 тізе буындарын сынай алады. Бұл сынақ машинасы сынақ күшін, сынақ уақыты мен жылдамдығын автоматты түрде басқарады және сынақ күші мен моментін нақты уақытта өлшейді. Ол тізе буынының протездерін жасауға, қолдануға және зерттеуге және басқа медициналық салаларға қатысты.
Шпиндель жетегі импортталған айнымалы ток сервоқозғалтқышы мен басқару жүйесін қабылдайды, ол жылдамдықты қадамсыз реттеуді және қажетті жылдамдық диапазонында тұрақты моментті/тұрақты осьтік күш шығысын есептеңіз; сынақ күші бұрандалы серіппелі жүктеу жүйесі арқылы қолданылады. Сынақ күші тұрақты және сенімді түрде қолданылады және сынақ күшін компьютер интерфейсінде оператор орнатуы мүмкін; шпиндельдің айналу жылдамдығы, Айналым саны, сынақ күші және сынақ уақыты сияқты параметрлердің барлығы компьютер арқылы басқарылады, ол сынақ деректерін нақты уақытта жинап, олардың сызбасын құра алады. Сәйкес сынақ қисығын жасауға болады және сынақ деректерін немесе қисығын қалауыңыз бойынша сақтауға, шығарып алуға және басып шығаруға болады.
Толық қосылыс AP, айналу, иілу Ұрту және басқа қозғалыстар үшін әртүрлі құрамдас бөліктері бар үш жақты сервоқозғалтқышпен басқарылатын жүктеу жүйесі, төрт компонентті күш сенсорының модулі сәйкесінше моменттің осьтік күшін, көлденең тарту және иілу моментін ұзарту кезіндегі моментті тексереді. , жоғары дәлдіктегі айналмалы кодтауышпен жабдықталған үш жақты сервоқұрылым, нақты уақыттағы бұрышты өлшеу және орын ауыстыру және негізгі компьютерді басқару үшін тиімді деректер көзін қамтамасыз етеді.
Әрбір қозғалыс механизмі біріктірілген құрамдас бөліктердің зақымдалу сынағын тегістеуді аяқтау үшін үш станция мен 15 осьпен дербес басқарылады және үйлестіріледі.
1.2 Негізгі техникалық сипаттамалар
1. Қытай операциялық интерфейсі бар құралды басқару бағдарламалық құралы.
2. Құралмен жұмыс істейтін бағдарламалық құрал пайдалануға дайын, арнайы бағдарламалық құрал қажет емес.
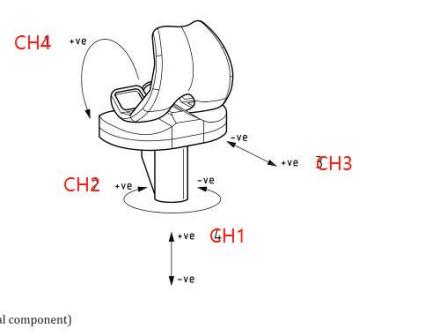
3. Еркіндік дәрежелері: Әрбір сынақ станциясы иілуді / ұзартуды, ішкі айналдыруды / сыртқы айналдыруды, алға/артқа қозғалысты, үш өлшемді қозғалысты басқаруды және осьтік күшті жүктеуді жүзеге асыра алады және әрбір еркіндік дәрежесі бақыланады. Сенсор да, күш те анықталады; ішкі/сыртқы бағытта және ішке/сыртқы бағытта еркін қозғалыс мүмкін.
4. Датчиктің сызықты еместігі толық шкаланың 0,10%-ынан, ал гистерезисі 0.10%-дан жоғары емес, қайталануы толық шкаланың 0,05%-нан көп емес.
5. Ауысу және орын ауыстыру сенсорының диапазоны: осьтік ығысу 100 мм, иілу/кеңейту 120, ішкі айналу/сыртқы айналу 20, алдыңғы / артқы орын ауыстыру 15 мм, медиальды / бүйірлік ығысу 5 мм, инверсия/
6. Жүктеме сыйымдылығы мен күш датчигі диапазоны: осьтік жүктеме 3KN , ішкі / сыртқы момент 20Нм , алға/артқа жүктеме 1KN .
7. Күш пен орын ауыстыруды басқару дәлдігі: бір цикл ішіндегі күш пен орын ауыстыру амплитудасының қателігі көрсетілген максимумнан аспауы керек Максималды фаза қателігі толық циклдің 3% аспауы керек. Құрал ISO 14243-1 және ISO 14243-3 сәйкес әрбір бақыланатын еркіндік дәрежесінде сыналады. Күш пен орын ауыстыру датчиктерінің өлшенген қисықтары мен ауытқу мәндері .
8. Оның сегіз арналы аналогтық енгізу функциясы бар және оны сыртқы деректермен синхрондауға болады.
9. Сынақ жиілігі: 1Гц , дәлдігі 0,1Гц.
10. Басқару жүйесі: Күш пен орын ауыстыруды тұйық циклді автоматты басқаруға қол жеткізу үшін ол бөлек көп станциялы, көп арналы сервоконтроллермен жабдықталуы керек.
11. Циклдік толқын пішіні басқару нұсқауы ретінде пайдаланылған кезде сигнал талап ететін ең жоғары мәнге дәл жетуге болатынын қамтамасыз ету үшін контроллер шыңнан алқапқа дейінгі мәнді басқару компенсациясын орындай алуы керек.
12. Ол реттелетін жүру қисықтарының бағдарламалау тестілеуін жүзеге асыра алуы керек; әрбір басқарылатын еркіндік дәрежесін қадамдық қолмен басқаруды орындай алу; және бастапқы деректерді Excel пішімінде экспорттай алу.
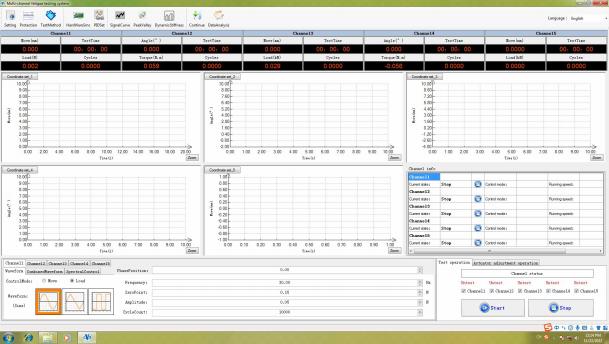
13. Сынақ кезінде бағдарламалық қамтамасыз ету нақты уақытта әрбір станцияның күш пен орын ауыстыру қисықтарын және басқару жүйесін көрсете алуы керек. Жүйе үлгінің қозғалыс қисығын қолмен араласусыз мақсатты қисыққа сәйкестендіру үшін автоматты түрде реттей алуы керек.
14. Нақты уақыттағы жабық циклды басқару жылдамдығы ≤ 6кГц , күш пен орын ауыстыруды басқару режимін қоспағанда, контроллер есептелген айнымалы басқару режимін жүзеге асыра алуы керек.
15. Сандық іріктеу жиілігі 100 кГц кем болмауы керек және іріктеу әдісі мыналарды қамтуы керек: ең жоғары мән, алқап мәні, уақыт уақыты, максимум, минимум, орташа , цикл/логарифм, т.б.
16. Оның қос режимі бар, арнаның кері байланысын шектеу арна командасының жұмыс режимі.
17. Оның сенсордың қозуының жоқтығын өздігінен тексеру функциясы бар.
18. Температура: Майлау ортасының температурасын (37 ℃) ұстап тұруға болады және температураны реттеу жүйесі бар.
19. Майлау ортасы : Түйісу бетін майлау ортасына батыруға болады, ал майлау ортасы ағып кетпей тығыздалуы керек; және ағып кетуді бақылау құрылғысымен жабдықталған.
20. Сынақ құрамдастары: сынау, жүктеу жұмыс станциялары және барлық қозғалыстар үшін жүктеу үшін қажетті құралдармен жабдықталған.
21. Апаттық тоқтату түймесі: Жабдық авариялық тоқтату түймесімен жабдықталуы керек.
22. Қауіпсіздікті қорғау: Жабдық мөлдір және мөлдір термопластикалық поликарбонатты материалдан жасалған қорғаныс қақпағымен жабдықталуы керек; Қауіпсіздік блоктау құрылғысы бар. Қорғаныс қақпағының есігі ашылған кезде жабдық сынақты автоматты түрде тоқтату мүмкіндігіне ие болуы керек.
1.3 Жұмыс шарттары
Бөлме температурасында 10 ℃~ 35 ℃ диапазонында;
Салыстырмалы ылғалдылық 80%-дан аспайды;
Қатты іргетасқа дұрыс орнату;
Дірілсіз, коррозиялық ортасыз және күшті электромагниттік өріс кедергісіз таза ортада;
Қуат көзінің кернеуінің ауытқу диапазоны номиналды кернеуден аспауы керек  10% .
10% .
2. Құрылымдық құрамы
Сынақ машинасы үш жұмыс станциясына бөлінген, олар шпиндельді жетек жүйесі, үлгіні жүктеу жүйесі және осьтік күш Үш жұмыс станциясы бір шпиндель жетегімен бөліседі. Динамикалық жүйе және бағдарламалық басқару жүйесі.
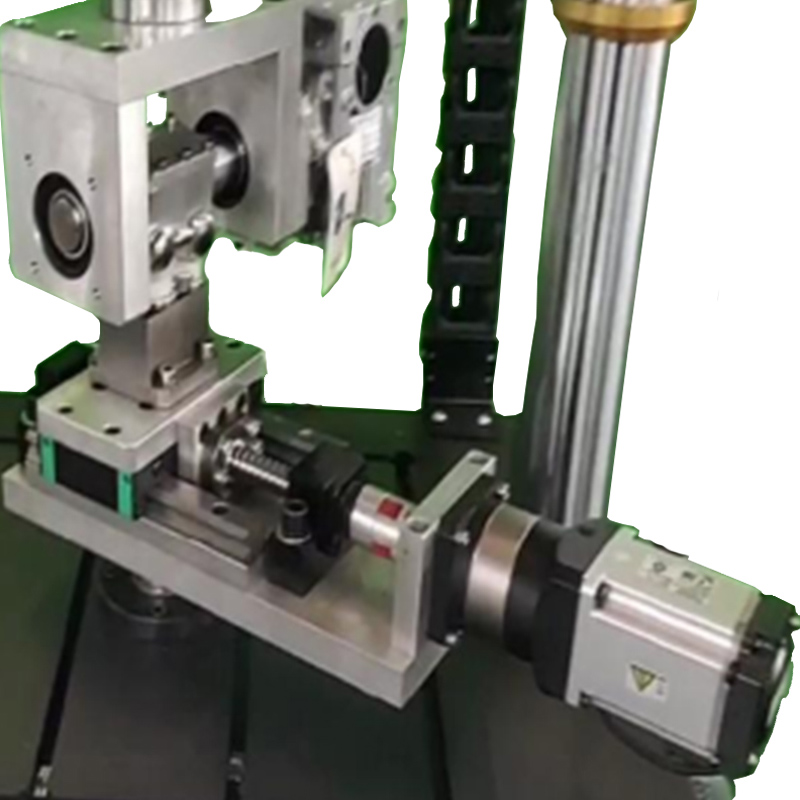
2.1 Шпиндельді жетек жүйесі
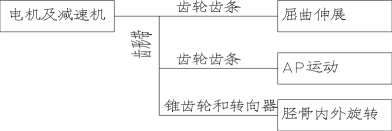
Ось қозғалтқышы Panasonic AC серво біріктірілген жылдамдықты басқару жүйесі мен қозғалтқышты пайдаланады. Қозғалтқыштың максималды қуаты 7,5 КВт, оның қуаты 3 шығыс желісіне бөлінген.
Біріншісі: беріліс тірегі, электромагниттік ілінісу және момент сенсорынан кейін ол жамбас сүйегінің айналмалы маятникіне айналады Электромагниттік ілінісу қуатты қосу және өшіру үшін жауапты, ал момент сенсоры айналу моментін өлшеу. Жұмыс кезінде айналу моментін өлшеңіз.
Екіншісі: тісті белдік пен беріліс тірегі арқылы өткеннен кейін ол солға және оңға поршенді аудармаға айналады, үлгі AP қозғалысын басқарады.
Үшіншісі: тісті белдік, конустық беріліс және рульдік механизм арқылы ол жіліншіктің айналмалы бұрылысына айналады, үлгіні ішке және сыртқа айналдыру үшін жылжытады.
Тасымалдау жолы төмендегі суретте көрсетілген.
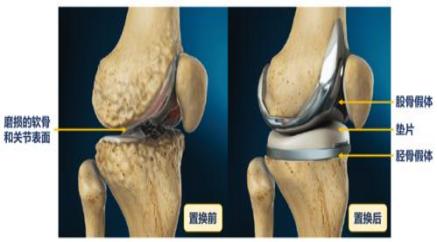
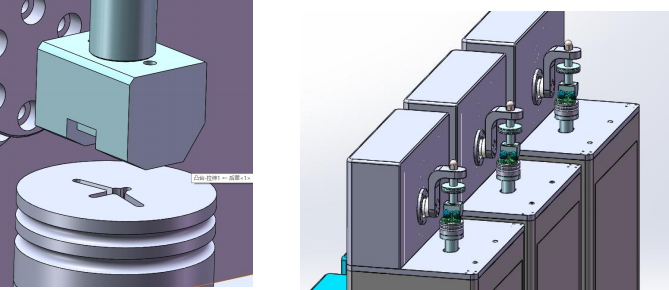
2.2 Үлгі жүктеу жүйесі
Үлгіні жүктеу жүйесі тізе буынының имплантант құрамдас бөліктері үшін адам жағдайында қозғалыс еркіндігін имитациялайды. Ол орнатылған және бекітілген. Ол монтаждық орындық, сырғымалы орындық, нейлон орындық, ролик, жылжымалы жең және т.б. тұрады.
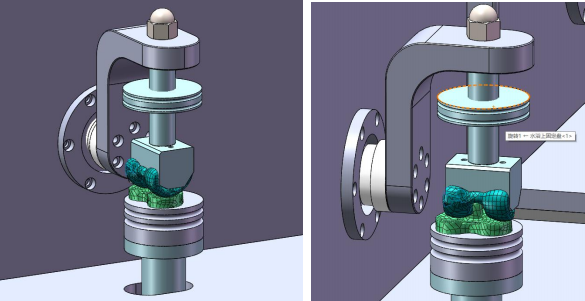
Нақты іске асыру келесідей:
Тізе буынының тозу құралын орнату салыстырмалы түрде күрделі. Оны схемаға сәйкес қатаң түрде орнатыңыз. Сонымен қатар, сәйкес арналар бекітілген.
Сымдарды қосқанда сәйкес сым нөмірін пайдаланыңыз.
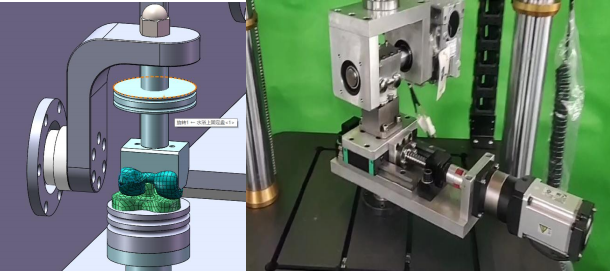
(Суретте көрсетілген құрылым тек қозғалыс принципін көрсету үшін пайдаланылады, нақты нысан басым болуы керек)
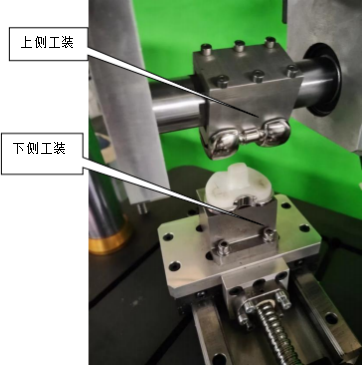

(Суретте көрсетілген құрылым тек қозғалыс принципін көрсету үшін пайдаланылады, нақты нысан басым болуы керек)
Сынақ талаптарына сай болу үшін үлгіге сәйкес жоғарғы және төменгі құралды қайта өңдеу керек. (Әр өнім өлшемі Мәліметтер әртүрлі)

6. Арна таңдау және оған қатысты түзетулер
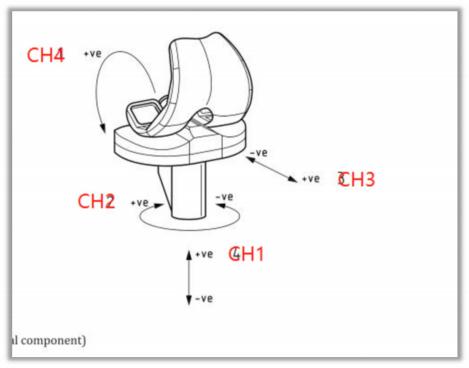
Жоғарыдағы суретпен біріктірілген арнаны тексеру арқылы қай арнаның жұмыс істеп тұрғанын тексеріңіз. ISO 14243.3 стандартын орындаған кезде 1-4 жолды таңдаңыз, 5-арна кейінгі жаңартулар үшін кеңейту арнасы болып табылады. Басқа бір осьті немесе қос осьті тәжірибелер үшін сәйкес арнаны таңдаңыз.
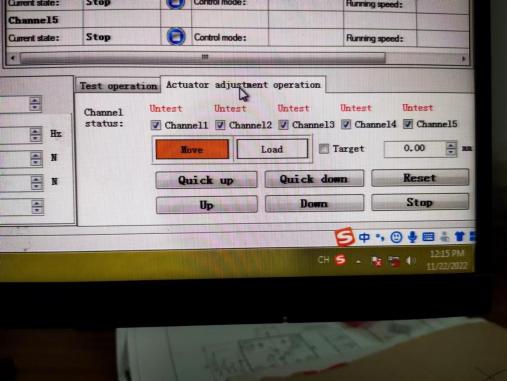
Жылдам/жоғарғы = жылдам жүктеу/жүктеу
Жылдам төмен/төмен = Жылдам төмен/төмен
7. ISO 14243.3 стандартына сәйкес, суретте көрсетілгендей басқару толқын пішінін импорттау қажет:
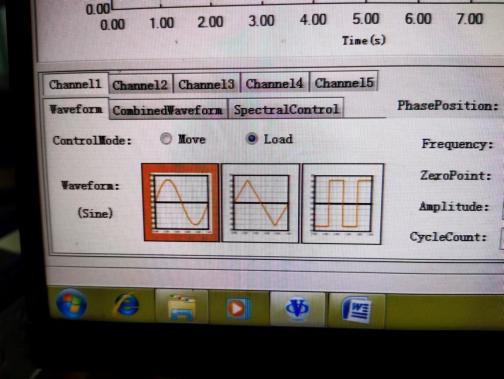
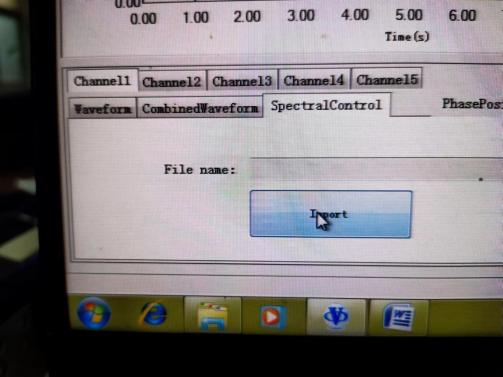
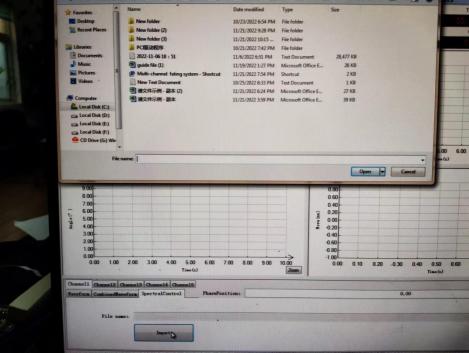
Зауыттық алдын ала орнатылған толқын пішінін таңдаңыз. Жаңа толқын пішінін немесе әрекетті орнату қажет болса, оны осы файлда орындауға болады. Өзгертіңіз және басқа атпен сақтаңыз.
Әрбір арна үшін егжей-тегжейлі реттеулер алу үшін бір арналы бағдарламалық құрал нұсқаулығын қараңыз.
8. Қорғау туралы:
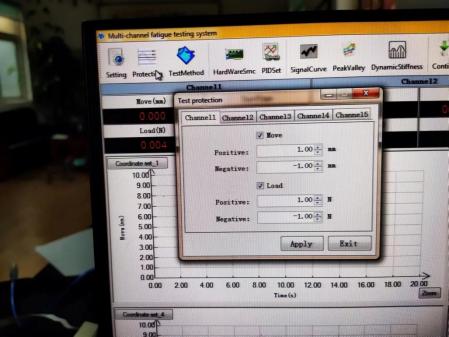
"Бастау" түймесін басқаннан кейін эксперимент қозғалмайды немесе іске қосылмайды, қорғау опцияларында рұқсат етілмеген параметрлердің бар-жоғын тексеріңіз.
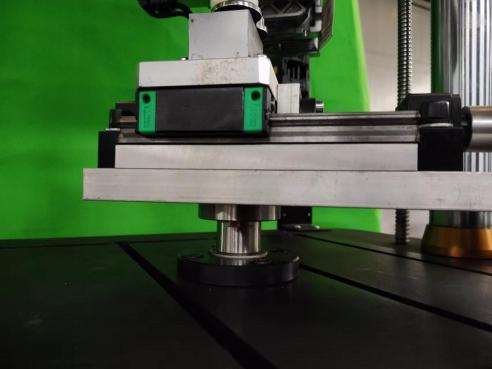
2.3 Осьтік күш жүктеу жүйесі
Бұл машина серіппелі жүктеме құрылымын қабылдайды. Жүктеу механизмі айналмалы доға тісті белбеу, синхронды шкив және дәлме-дәл шарикті бұрандалы жұп арқылы берілетін қадамдық қозғалтқышпен басқарылады және күш қолдану орындықты басқару үшін дәл сызықты қозғалысты бағыттаушы рельс арқылы басқарылады. Күш беретін орын серіппелі механизммен бекітіледі, ол серіппе қысылғаннан кейін сырғанау платформасына күш түсіреді. Ролик үлгісінің үйкеліс беттері арасындағы сынақ күші қалыптасады . Қозғалтқышты басқару арқылы орындықты кеңістікте алға және артқа жылжыту үшін, яғни сынақ күшінің қолданылуы мен шамасын басқаруға болады. Күш қолдану орнының жазықтығына жүктеме сенсоры орнатылған. Күш сигналдарын жинаңыз. Сызықтық қозғалыстағы мойынтіректердің бағыттауы сынақ күшінің қолданылуын және тұрақтылығын қамтамасыз етеді. Серіппелі тиеу бөлігі Тиеу және түсіру оңай.
Сынақ күші жүктеле бастағанда, сенсор микрокомпьютерді басқару жүйесіне алдын ала орнатылған қысымды және алдын ала орнатылған қысымды енгізеді. Содан кейін микрокомпьютер жүйе қысымы алдын ала орнатылған қысыммен теңестірілгенше қозғалтқышты кері бұру үшін басқарады.
2.4 Жүктемені сіңіру жүйесі
батырылатын сұйықтық қорабы, жылытқыш, температура сенсоры, перистальтикалық сорғы, силикон түтік және т.б.
Тұтынушылар үлгінің нақты өлшеміне сәйкес цилиндрлік ұшы бетіндегі орналасу тесіктерін өңдей алады және қысу бұрышы реттеледі. Бұрышты реттегеннен кейін сол жақ орналасу сырғытпасын бекітіңіз.
2.5 Бағдарламалық құралды басқару жүйесі Басқару жүйесі басқару құрылғысына орнатылған және байланыс кабелі арқылы сынақ хостына қосылған. Бағдарламалық құралдың жұмыс ортасы WINDOWS XP болып табылады. Басқару бағдарламалық құралы жүйенің іске қосылуын және тоқтауын, жұмыс жылдамдығын, жүктеу күшін, суға батыру сұйықтығының температурасын басқару үшін нұсқауларды жіберуге және осьтік күш, момент, температура, сынақ уақыты сияқты жүйе жұмысының деректерін жинауға жауап беретін графикалық интерактивті жұмыс интерфейсі болып табылады. сынақ кезінде және т.б. Есептеу және өңдеуден кейін сынақ күшінің уақыты, моментінің уақыты және басқа деректер қисықтары диаграммалар түрінде шығарылады. Жоғарыдағы суретпен біріктіріп, қай арна жұмыс істеп тұрғанын растау үшін арнаны тексеріңіз. ISO 14243.3 стандартын орындау кезінде 1-4 арнаны таңдаңыз, 5 т ол арна келесі жаңартулар үшін кеңейту арнасы болып табылады. Басқа бір осьті немесе екі осьті тәжірибелер үшін сәйкес арнаны таңдаңыз. Жылдам қосу/жоғарылау = жылдам жүктеу/жүктеу Жылдам төмендету/төмен = жылдам жою/жою 7. ISO 14243.3 стандартына сәйкес, суретте көрсетілгендей басқару толқын пішінін импорттау қажет: Зауытта алдын ала жасалған толқын пішінін таңдаңыз. Жаңа толқын пішінін немесе әрекетті орнату қажет болса, оны осы файлда өзгертуге болады. Басқа атпен сақтаңыз. Әрбір арна үшін егжей-тегжейлі реттеулер алу үшін бір арналы бағдарламалық құрал нұсқаулығын қараңыз. 8. Қорғау туралы: "Бастау" түймесін басқаннан кейін эксперимент қозғалмайды немесе іске қосылмайды, қорғау опцияларында рұқсат етілмеген параметрлердің бар-жоғын тексеріңіз. 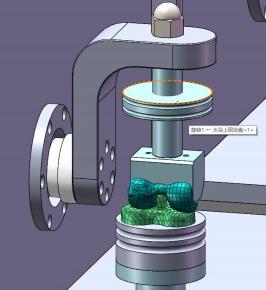
 {1}9018
{1}9018

 {49018}
{49018}
 Қосарна және теңгерім жолағы шаршауды сынайтын құрылғы
Қосарна және теңгерім жолағы шаршауды сынайтын құрылғы
 Тіс материалының поршенді үйкелісін сынау машиналары
Тіс материалының поршенді үйкелісін сынау машиналары
 Айналмалы иілуді шаршауды сынайтын құрылғы
Айналмалы иілуді шаршауды сынайтын құрылғы
 Сүйек пластинасының майысуының шаршауын сынайтын құрылғы
Сүйек пластинасының майысуының шаршауын сынайтын құрылғы
 Интрамедуллярлық тырнақтарды кесуді сынау құрылғысы
Интрамедуллярлық тырнақтарды кесуді сынау құрылғысы
 Омыртқаның ішкі бекіту жүйесінің қысу және бұралу шаршауын сынау құрылғысы
Омыртқаның ішкі бекіту жүйесінің қысу және бұралу шаршауын сынау құрылғысы